Multivariate Calculus
&
Ordinary Differential Equations
Lecture 12
1 Ordinary Differential Equations
1.8 Simple Harmonic Motion and Damped Oscillations
This section deals with the modelling of oscillators by second-order ODEs. This material is covered in Stewart Section 17.3.
1 Ordinary Differential Equations
1.8.1 The undamped spring
A spring of (natural) length $L$ is stretched a distance $s$ by a weight with mass $m$.
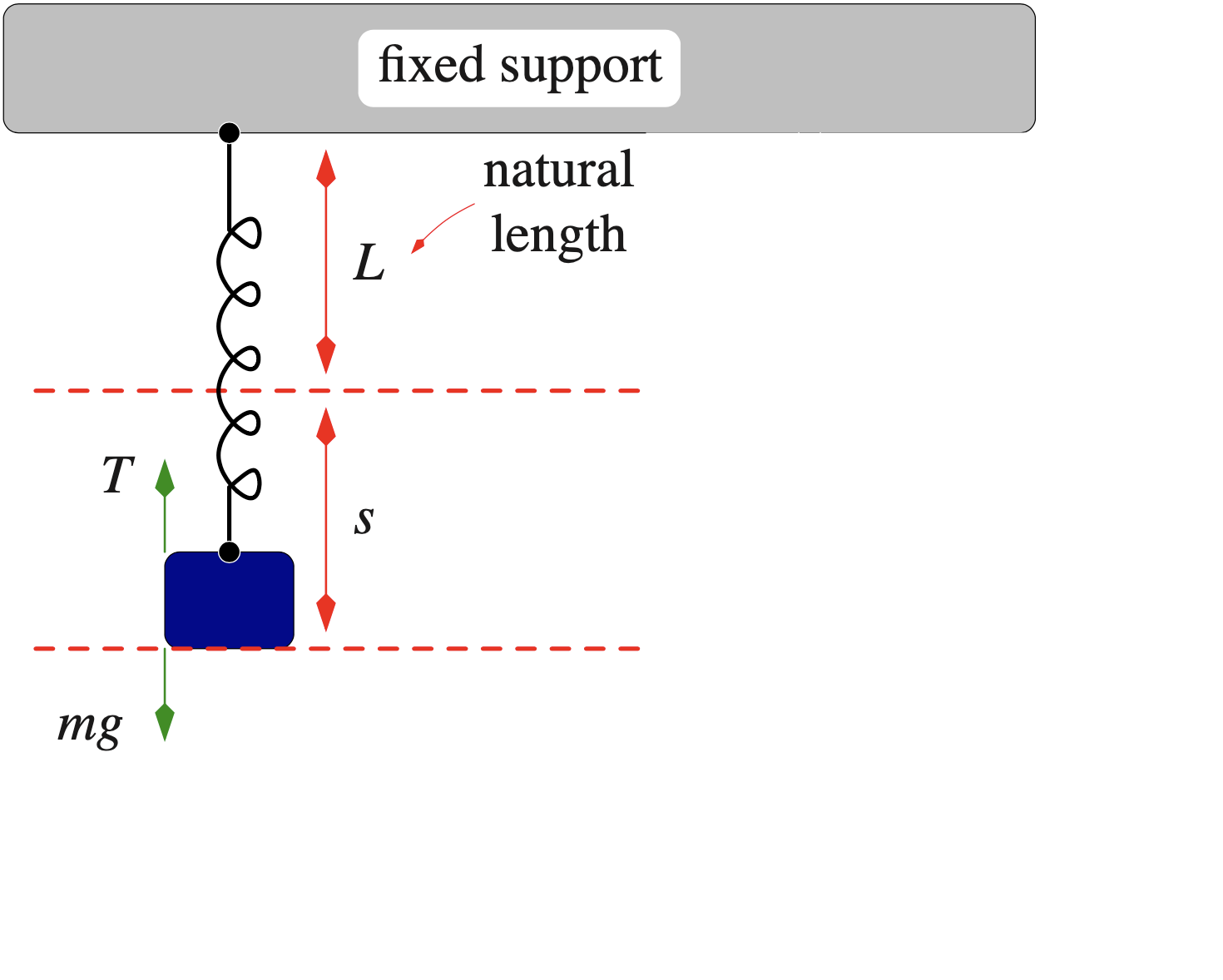
In equilibrium we take the position of the weight (viewed as a point-particle) to be $x=0,$ with the positive $x$-axis pointing down.
1 Ordinary Differential Equations
1.8.1 The undamped spring
If we pull down the weight and then release it, it will start to oscillate.
If we assume the weight-spring-system moves free of any resistance (no air-resistance and no internal friction in the spring) we say the spring is undamped.
1 Ordinary Differential Equations
1.8.1 The undamped spring
Use mouse to drag mass and release.
1 Ordinary Differential Equations
18.1 The undamped spring
To derive an ODE for the undamped spring we must combine Newton's second law and Hooke's law.
According to Hooke's linear spring law the restoring force $T$ exerted by the spring ("trying to unstretch") is proportional to the distance $d$ it is stretched:
$T=-k d.$
Here $k>0$ is measured in N m$^{-1}$ and is called the spring constant. Since $k>0$, the tension in the spring acts to restore the spring to its natural length. The larger the spring constant, the more tightly-coiled the spring.
1 Ordinary Differential Equations
18.1 The undamped spring
Remark: As we all know from experience, Hooke's law only works if we do not stretch a spring too much.
1 Ordinary Differential Equations
18.1 The undamped spring
1 Ordinary Differential Equations
18.1 The undamped spring
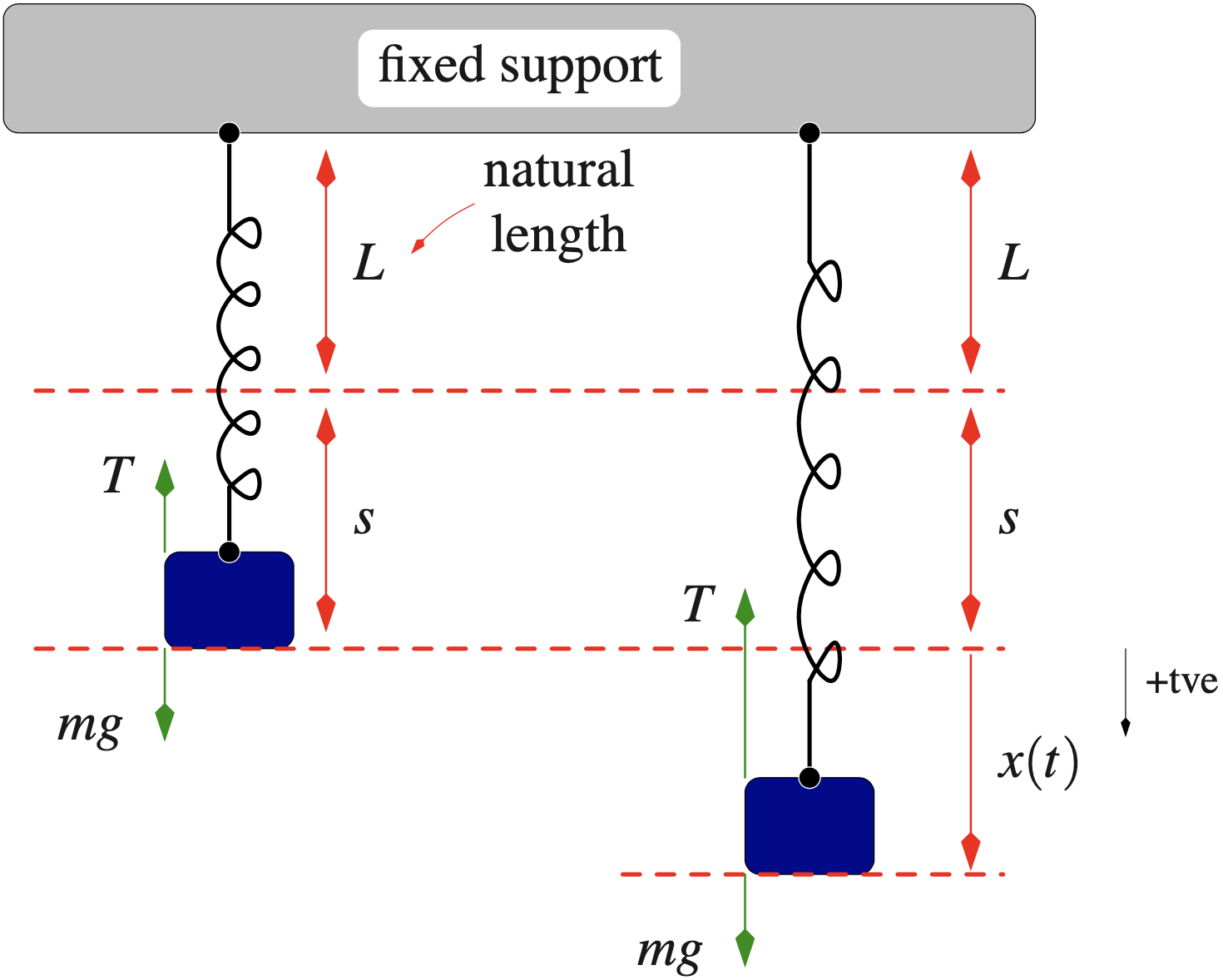
According to Hooke's law the total force $F$ is given by
$F= \underbrace{-k(s+x)}_{\text{restoring force}}+ \underbrace{m g}_{\text{gravitational force}}$
with $x=x(t)$ the displacement out of equilibrium and $g ~(\approx~9.8~\text{m}/\text{s}^2)$ the acceleration on the Earth's surface.
Before we pulled down the weight the system was in equilibrium, so that $k s=m g.$
1 Ordinary Differential Equations
18.1 The undamped spring
Before we pulled down the weight the system was in equilibrium, so that $k s=m g.$
We are thus left with
$F=-kx. \qquad (*)$
According to Newton's second law of motion the total force equals mass times acceleration:
$F=m x''. \qquad (**)$
1 Ordinary Differential Equations
18.1 The undamped spring
$F=-kx. \qquad (*)$
$F=m x''. \qquad (**)$
Equating $(*)$ and $(**)$ leads to the equation of motion
$m x''+k x=0$
(which holds throughout the Universe, not just on Earth).
1 Ordinary Differential Equations
18.1 The undamped spring
$m x''+k x=0$
The equation of motion only depends on the ratio of $k$ and $m,$ and it is customary to introduce
$\ds \omega^2=\frac{k}{m},$
where $\omega>0$ is known as the angular frequency.
Then the equation of motion for the undamped spring is thus given by
$\ds x''+\omega^2 x=0.$
1 Ordinary Differential Equations
18.1 The undamped spring
$\ds x''+\omega^2 x=0.$
This is a homogeneous second-order linear ODE with constant coefficients.
The corresponding characteristic equation is given by
$\ds \lambda^2+\omega^2=0$
with purely imaginary roots
$\ds \lambda_1=i \omega \quad\text{and}\quad \lambda_2=-i \omega.$
Two linearly independent solutions are thus
$e^{i\omega t}\quad\text{and}\quad e^{-i\omega t}$
1 Ordinary Differential Equations
18.1 The undamped spring
$\ds x''+\omega^2 x=0.$
Two linearly independent solutions are thus
$e^{i\omega t}\quad\text{and}\quad e^{-i\omega t} $
or $\;\;\ds \cos(\omega t)\quad\text{and}\quad \sin(\omega t).\quad\;\,$
and the general solution is
$\ds x(t)=c_1 \cos(\omega t)+c_2\sin(\omega t).$
Although we could stop here it is standard to rewrite the above solution in the alternative form
$x(t)=A \cos(\omega t-\phi),$
1 Ordinary Differential Equations
18.1 The undamped spring
$\ds x''+\omega^2 x=0.$
Although we could stop here it is standard to rewrite the above solution in the alternative form
$x(t)=A \cos(\omega t-\phi),$
where the two constants $c_1$ and $c_2$ have been traded for two new constants $A>0$ and $\phi\in(-\pi,\pi],$ known as the amplitude and phase shift.
1 Ordinary Differential Equations
18.1 The undamped spring
Although we could stop here it is standard to rewrite the above solution in the alternative form
$x(t)=A \cos(\omega t-\phi),$
where the two constants $c_1$ and $c_2$ have been traded for two new constants $A>0$ and $\phi\in(-\pi,\pi],$ known as the amplitude and phase shift.
1 Ordinary Differential Equations
18.1 The undamped spring
1 Ordinary Differential Equations
18.1 The undamped spring
Example: Find the relation between $c_1,c_2$ and $A,\phi$.
Consider $\cos \left(a+b\right) = \cos a + \cos b - \sin a \sin b.$
So $x(t) = A \cos \left(\omega t - \phi \right)$
$\qquad = A \big[\cos \left(\omega t \right)\cos \left(-\phi\right) - \sin \left(\omega t \right)\sin \left(-\phi\right)\big]$
$\qquad = A \cos \left(\phi\right) \cos \left(\omega t \right) + A\sin \left(\phi\right) \sin \left(\omega t \right)$
$\qquad =c_1 \cos \left(\omega t \right) +c_2 \sin \left(\omega t \right).$
Thus $\,c_1 = A \cos \left(\phi\right)\,$ and $\,c_2 = A \sin \left(\phi\right).$
1 Ordinary Differential Equations
18.1 The undamped spring
Example: A mass of $9$kg is attached to a spring with spring constant $4$N/m. The spring is pulled down $1$m and given an initial upward kick of $\,-0.5$ m/s. Solve for position as a function of time and explicitly determine the amplitude of the oscillations.
Here the equation of motions is $\ds \, x''+\frac{k}{m} x=0.$
$k=4, m = 9.$
So $\ds \, x''+\frac{4}{9} x=0.$
Also $\ds \, x(0)=1, x'(0)=-\frac{1}{2}.$
1 Ordinary Differential Equations
18.1 The undamped spring
$\ds \, x''+\frac{4}{9} x=0\,$ and $\ds \, x(0)=1, x'(0)=-\frac{1}{2}$
Characteristic equation: $\ds \, \lambda^2 +\frac{4}{9} = 0\,$ $\ds \Ra \lambda = \pm \frac{2}{3}i.$
General solution: $\ds x(t) = c_1 \cos \left(\frac{2}{3}t\right) + c_2 \sin \left(\frac{2}{3}t\right) $
$\Ra \ds x'(t) =-\frac{2}{3} c_1 \sin \left(\frac{2}{3}t\right) + \frac{2}{3} c_2 \cos \left(\frac{2}{3}t\right) $
Since $\,x(0)=1\, $ $\ds \Ra c_1 =1 $
1 Ordinary Differential Equations
18.1 The undamped spring
General solution: $\ds x(t) = c_1 \cos \left(\frac{2}{3}t\right) + c_2 \sin \left(\frac{2}{3}t\right) $
$\Ra \ds x'(t) =-\frac{2}{3} c_1 \sin \left(\frac{2}{3}t\right) + \frac{2}{3} c_2 \cos \left(\frac{2}{3}t\right) $
$ x'(0) $ $\ds= 0 + \frac{2}{3} c_2 \, $ $\ds = -\frac{1}{2} $ $\ds \Ra c_2 =-\frac{3}{4}$
$\ds \Ra x(t) = \cos \left(\frac{2}{3}t\right) - \frac{3}{4} \sin \left(\frac{2}{3}t\right) $
1 Ordinary Differential Equations
18.2 The damped spring
Use mouse to drag mass and release.
Compare with the undamped spring simulation shown before.
Source code